Magnetic Levitation
Levitation from 1996 Popular Electronics
- Introduction
- How It Works
- Control Systems
- Open or Closed?
- Basics of PID
- Schematic
- Circuit
- Construction
- Adjustment
Open or Closed Systems?
Let's stick to the example of home heating to do a little comparison between open-and closed-loop systems. The simplest type of heater (see Fig. 1) has a power-level switch (usually with off, low, medium, and high settings) and a heating element. An electrical signal flows from the power control to the heater, and the heated air flows from the heater to the room. No signal comes back telling the system how well the room is being heated. For that reason, it is called an open-loop control system because the signals in the system only flow in one direction.
The disadvantage of an open-loop system is that you constantly have to adjust the power control to maintain a comfortable temperature in the room. On cool days the power should be on low, on really cold days it should be on high. The necessary setting will vary from the morning to the evening. However, if you install an output sensor, you can determine when the room's temperature is too high or too low and adjust the power to the heater accordingly. Such a closed-loop system is shown in Fig. 2.
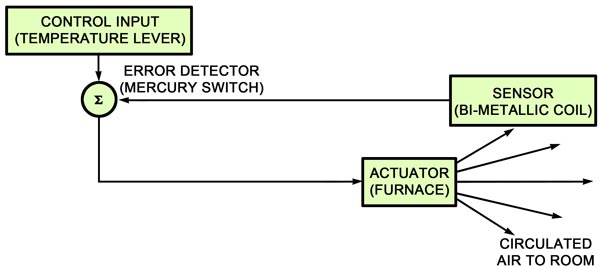
Fig. 2. With the addition of an error detector and an output sensor, a control system becomes a closed-loop type. The system shown here can determine when the room's temperature is too high or too low and adjust the power to the heater accordingly.
The output sensor and error detector shown in Fig. 2 are housed in the thermostat that is used to regulate the heater's output. That thermostat fills the roles of the sensor, error detector, and control input in the system. In many such thermostats, a lever sticking out of the thermostat moves over a temperature scale, while its axis is attached to the center of a spiraled bimetallic strip. The other end of the bimetallic strip is attached to a mercury-level switch.
When the switch is level, the mercury in it lies in the center of the switch and doesn't close any of the switch's contacts. When the switch tips in one direction a heater contact is closed; when it tips in the other direction a cooling contact is closed. If the room temperature heats up, the metal strip rotates in the cooling direction, tips the mercury switch accordingly, and turns off the heater. When the room cools down, the metal strip rotates in the other direction, tilting the mercury switch, and turns the heater on. The lever can turn the coil initially to one side or the other, causing the coil to have to turn further back or further forward to keep the switch level. Thus the room's temperature will have to be hotter or colder to level out the mercury switch.
That type of control system is sometimes called a "bang-bang" controller because the actuator is either fully on or fully off (that results in a rattle or "bang" of a furnace). It works well as long as you do not need very precise control, say an accuracy of ± a few degrees, but can have problems if used for more accurate control. That's because the slightest disturbance to the thermostat will cause it to turn the heater on or off, as the case might be.
To avoid such instability, you need to design hysterisis into the controller. In other words, when the room gets hot, the heater shouldn't turn off until the temperature is a few degrees hotter than the thermostat setting. Likewise, when the room is cool, the heater shouldn't turn back on until the room is a few degrees cooler than the setting on the thermostat. That keeps random disturbances, like drafts caused by opening a door, from affecting the system.
So, as you can see, there are cases where a much better system than a bang-bang controller is needed. That is where Proportional-Integral-Derivative (PID) controllers come into the picture.
This article is reprinted from Popular Electronics, May 1996.
| < Previous | Page 4 of 9 | Next > |
©1998-2026 Barry Hansen